Examples¶
Note: You should always start examples from root directory of pylocating.
Federated Particles¶
Two separated environments contain a different number of particles. All the particles are PSOParticle (they follow a standard PSO model). The initial position of particles are around the beacons.
/path/to/pylocating$ scripts/bestfitnessgraph.sh federated_particles 20 10
- arguments:
- 20: the first environment contains 20 particles
- 10: the second environment contains 10 particles
FollowBest Particles¶
Two connected environments contain a different number of particles. The first environment contains GlobalBestPSOParticle particles (the same of PSOParticle, but in this case the best fitness is the best found by all environments instead of the best found inside the environment itself). The second environment contains FollowBestParticle; they are special particles that only search around the globally found best position in that moment.
/path/to/pylocating$ scripts/bestfitnessgraph.sh followbest_particles 20 10
- arguments:
- 20: the first environment contains 20 particles
- 10: the second environment contains 10 particles
Start from beacon sphere surface¶
One single environment contains all particles. Them are equally distributed around the beacons on the sphere surface with center the beacon itself and radius the distance measured. 3/4 of all particles are PSOParticle. The rest are FollowBestParticle.
/path/to/pylocating$ scripts/bestfitnessgraph.sh start_from_sphere_surface 16
- arguments:
- 16: the environment contains 16 particles.
- note: the number of particle should be divisible for 4 (the number of
- beacons).
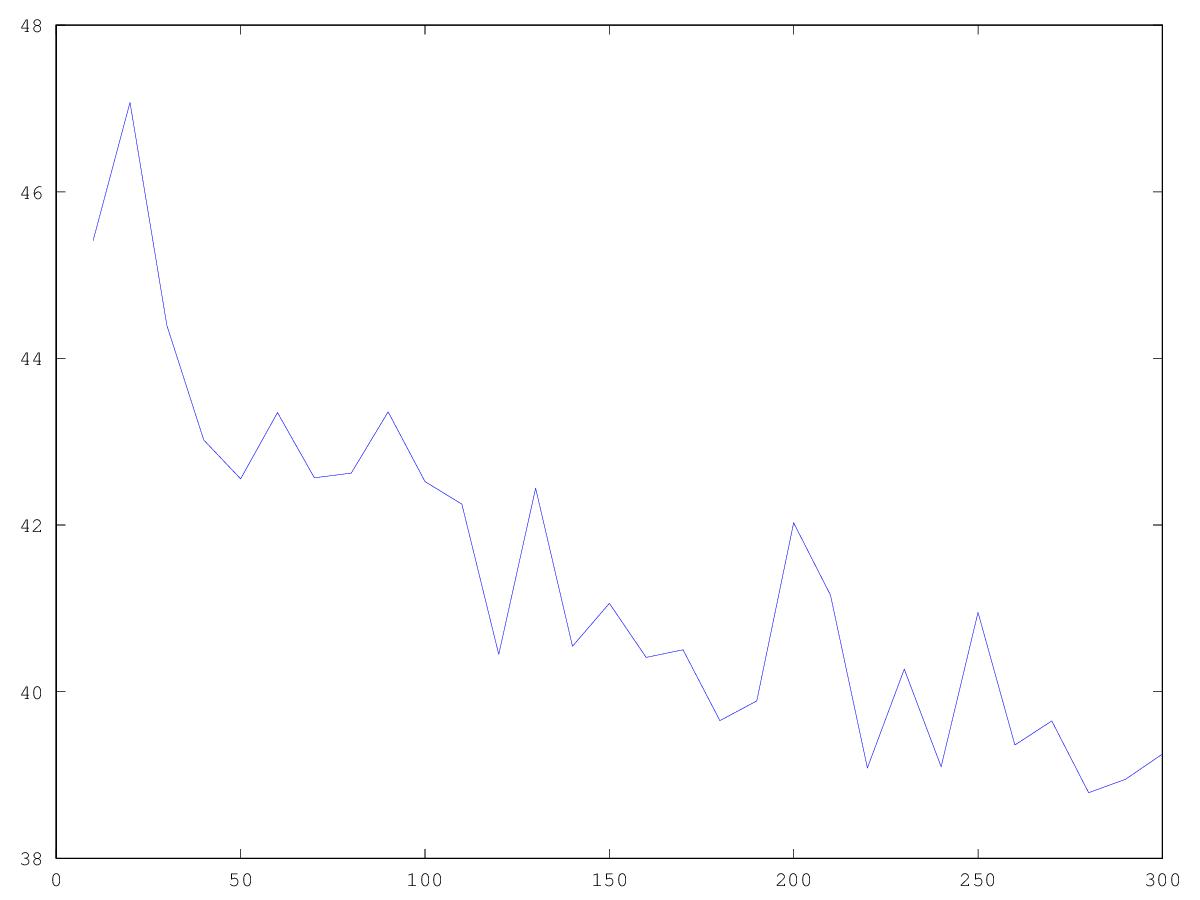
Benchmarks 1 - config 1¶
Evaluate distance error as a function of swarm size:
- error introduced: 3
- inertial weight: 1
- cognition: 2
- social: 2
- number of particles: range [10, 300]
- max particle velocity: 0.5
- interations per particle: 60
There is only one environmnent where all PSOParticle is connected.
The virtual space where the 4 beacons and the point is inserted is defined by:
- center: [1000, 1000, 1000]
- side length: 100
Every time the benchmark is started, their position are chosen randomly inside this cube. The distance error introduced is fixed and moved every time in a different position in the space. The benchmark is executed 100 times:
examples/benchmark_1.config1.sh 100
At the end of execution, you can see /tmp/benchmark_1.config1.jpg file generated.
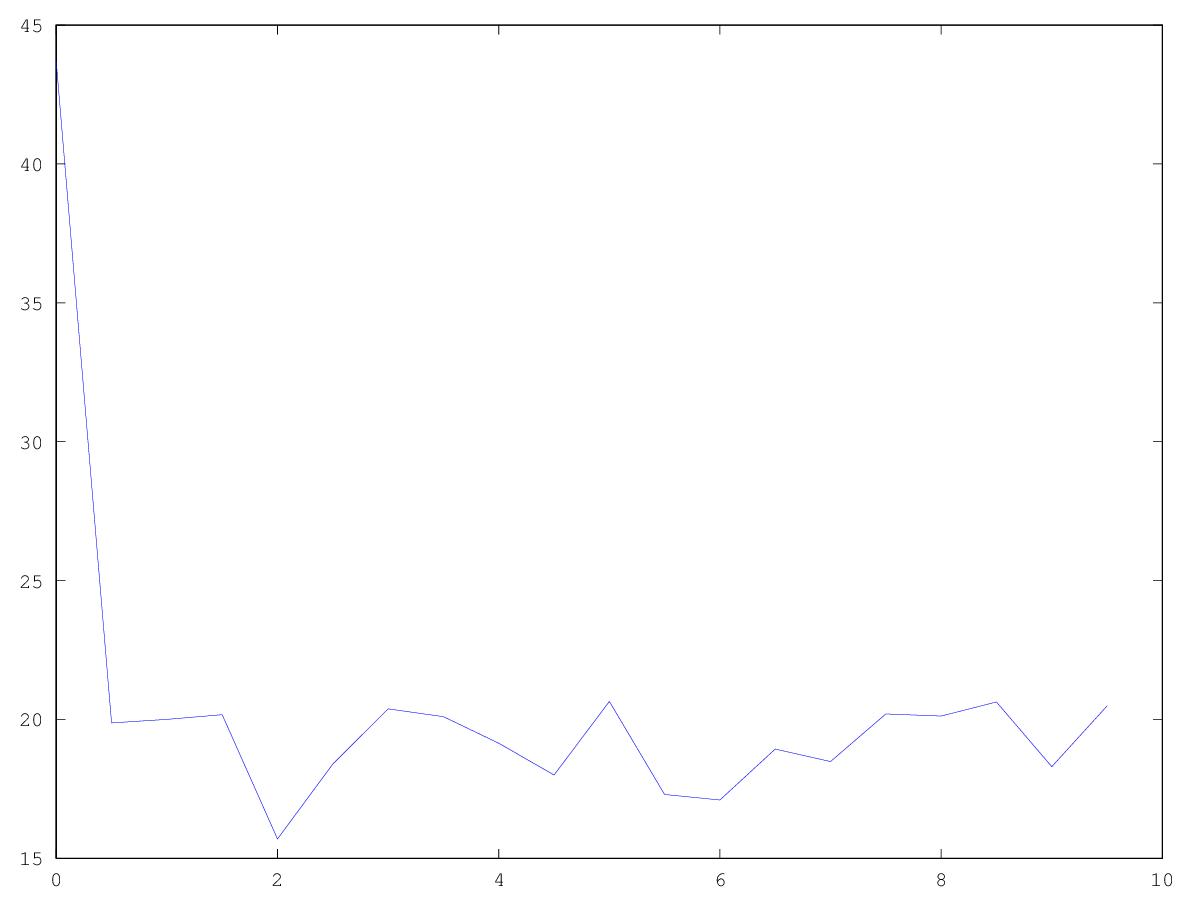
Benchmarks 1 - config 2¶
Evaluate distance error as a function of social parameter:
- error introduced: 3
- inertial weight: 1
- cognition: 2
- social: range [0, 10]
- number of particles: 100
- max particle velocity: 5
- interations per particle: 60
There is only one environmnent where all PSOParticle is connected.
The virtual space where the 4 beacons and the point is inserted is defined by:
- center: [1000, 1000, 1000]
- side length: 100
Every time the benchmark is started, their position are chosen randomly inside this cube. The distance error introduced is fixed and moved every time in a different position in the space. The benchmark is executed 100 times:
examples/benchmark_1.config2.sh 100
At the end of execution, you can see /tmp/benchmark_1.config2.jpg file generated.
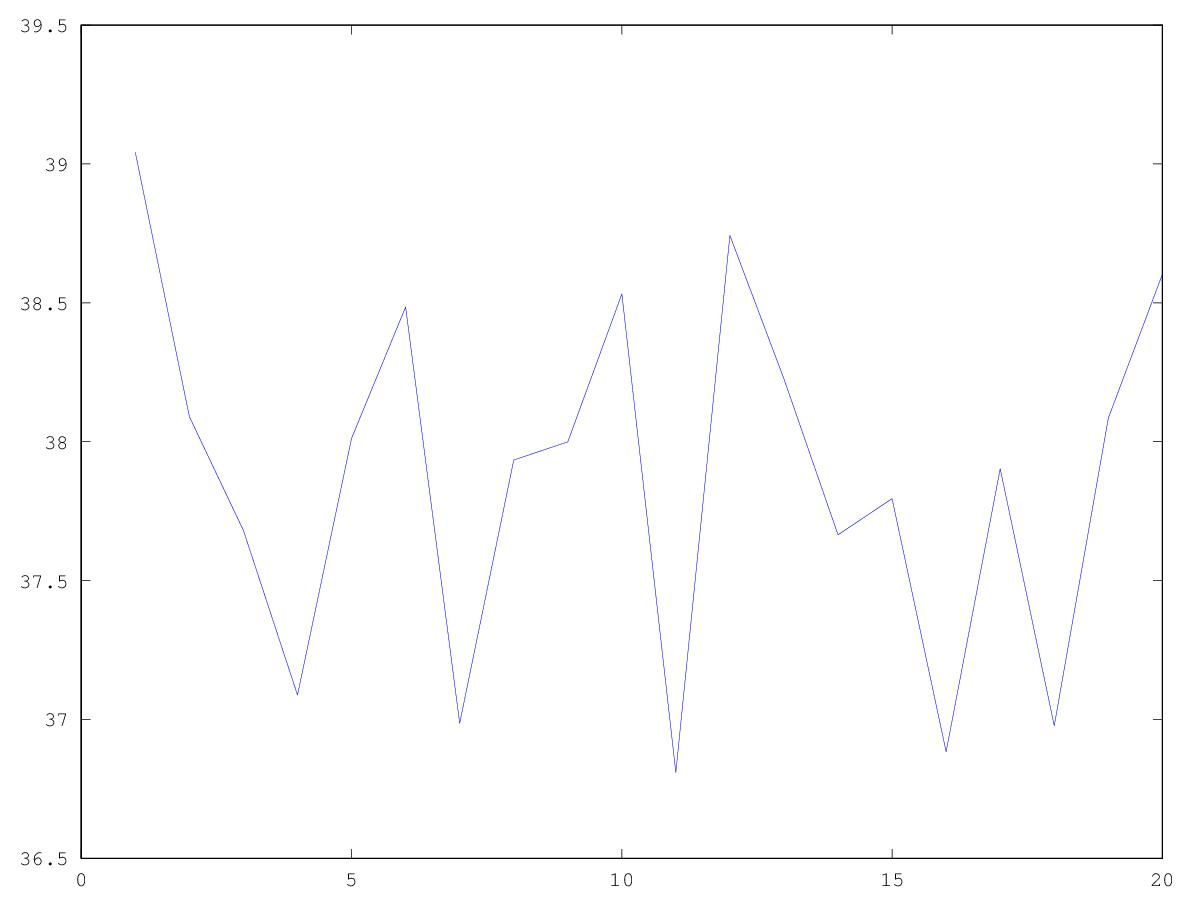
Benchmarks 2 - config 1¶
Evaluate distance error as a function of FollowBestParticle swarm size:
- error introduced: 3
- inertial weight: 1
- cognition: 2
- social: 2
- number of particles: range 80
- number of particles: range [1, 20]
- max particle velocity: 5
- interations per particle: 60
- There are two environmnents:
- the first where PSOParticle are inserted
- the second where FollowBestParticle are inserted
The two environmnents are connected together.
The virtual space where the 4 beacons and the point is inserted is defined by:
- center: [1000, 1000, 1000]
- side length: 100
Every time the benchmark is started, their position are chosen randomly inside this cube. The distance error introduced is fixed and moved every time in a different position in the space. The benchmark is executed 100 times:
examples/benchmark_2.config1.sh 100
At the end of execution, you can see /tmp/benchmark_2.config1.jpg file generated.